


توضیحات
طراحی و تست سیستم کنترل گوی و تیر با متلب
شبیه سازی در محیط سیمولینک متلب انجام شده است. (در متلب 2016a شبیه سازی انجام شده است)
دارای گزارش ورد 13 صفحه ای است.
شرح پروژه:
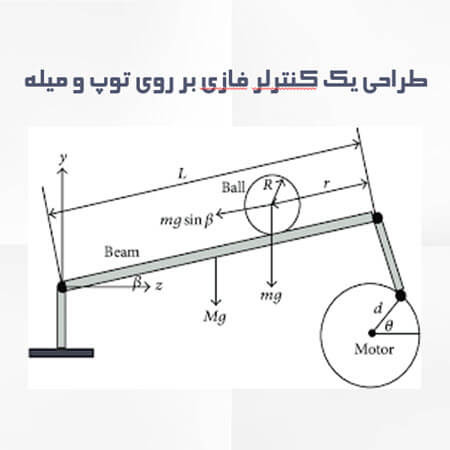
با استفاده از سروموتور DC با کمک فیدبک میتوان کنترل موقعیت و سرعت انجام داد. فرض کنید که میخواهیم از یک موتور DC برای کنترل سیستم گوی و تیر استفاده شود. سرو موتور برای تغییر موقعیت گوی که روی تیر افقی قرار گرفته است استفاده میگردد. این کار با تغییر زاویه تیر و در نتیجه حرکت دادن گوی به حدود موقعیت مورد نظر و سپس افقی کردن تیر و کنترل موقعیت تیر انجام
میشود(.شکل )

کنترل گوی و تیر
سیستم اندازه گیری موقعیت گوی به این شرح است که مطابق شکل 2گوی رسانایی روی دو میله موازی حرکت میکند، یک فنر مقاومتی به صورت استوانهای پیچیده شده است که مقاومت هر قسمت آن با طول همان قسمت متناسب است. در طرف دیگرمیلهای فلزی که رسانای جریان الکتریسیته است، قرار دارد .به این وسیله موقعیت گوی با اندازه گیری جریان ناچیزی که از مقاومت و میله میگذرد، محاسبه میشود.
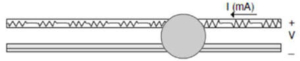
شکل2 – تعیین مکان گوی
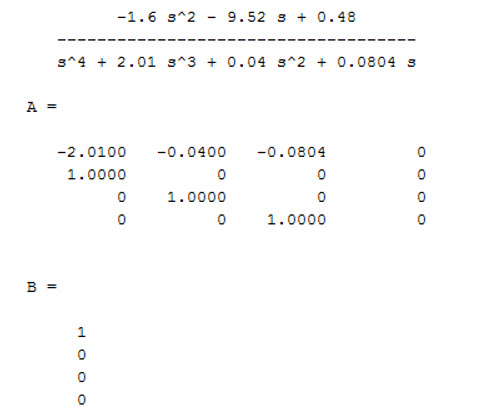
بخش اول : مدلسازی دینامیک سیستم
هدف در این بخش تعیین تابع تبدیل مدار باز X/Xd
همانطور که ذکر شد موقعیت زاویهای میله از طریق یک سرو کنترل میشود لذا سادهتر خواهد بود اگر سیستم در قالب دو زیرسیستم زیر مدل شود:
1- زیرسیستم تیر و گلوله که در آن با کنترل مقدار θ سعی میشود موقعیت مطلوب گلوله (Xd) حاصل شود.
2- زیرسیستم سروموتور که با اعمال ولتاژ مناسب به دو سر آرمیچر موتور را برای دستیابی به زاویه مطلوب (θd) کنترل میکند.
بنابر این مطلوبست استخراج معادلات حاکم بر دو زیرسیستم فوق و تعیین توابع تبدیل
الف- X /θ برای زیرسیستم تیر و گلوله
ب- θd برای زیر سیستم سرو موتور و تیر مشروط بر این که بلوک دیاگرام سیستم کنترلی سرو به صورت زیر باشد
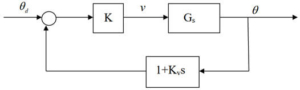
بلوک دیاگرام سیستم کنترلی
که در آن Gsتابع تبدیل مدار باز سیستم سروموتور از ورودی ولتاژ آرمیچر به خروجی زاویه تیر است.
در استخراج معادلات فوق فرضیات زیر را در نظر بگیرید:
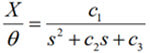
1- از ممان اینرسی گلوله صرفنظر کنید و نشان دهید تابع تبدیل X/θ دارای فرم کلی زیر است:
2- زاویه تیر را کوچک فرض کنید.
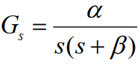
3- برای استخراج تابع تبدیل Gs از جرم و ممان اینرسی گلوله صرفنظر کنید (دینامیک بار را ندیده بگیرید) و نشان دهید فرم کلی این تابع تبدیل با تقریب خوبی به فرم زیر است:
ج- با توجه به این که سازنده سروموتور به جای مقادیر Kv ،Kو سایر پارامترهای موتور زمان نشست پاسخ و ماکزیمم فراجهش موتور را در حالت بی باری به صورت زیر داده است
– ماکزیمم فرا جهش در حالت بیباری %20
– زمان نشست در حالت بیباری 0/25ثانیه
مطلوب است تقریب تابع تبدیل مجموعه سرو و تیر (تیر را میله یکنواخت با جرم 600گرم و طول 60سانتیمتر در نظر بگیرید) همچنین مقادیر C1, C2 ,C3 را با فرض جرم گلوله برابر 200 گرم و شعاع گلوله برابر 0/0175 متر به دست آورید.
بخش دوم: طراحی کنترلر
د- میخواهیم سیستم را از طریق طراحی یک کنترلر با فیدبک واحد به نحوی کنترل کنیم که برای یک ورودی پله گلوله با فراجهش 25% در طی 5ثانیه به مقدار نهایی خود برسد. (نوع کنترلر را پیشنهاد داده و آن را طراحی کنید. در فرایند طراحی مقادیر c3=0 , c2=0 , c1=3.37 را برای سیستم در نظر بگیرید. دیاگرام بلوکی سیستم کنترل شده به صورت زیر است)
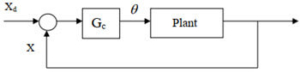
دیاگرام بلوکی سیستم کنترل
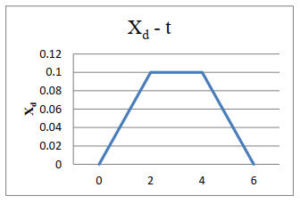
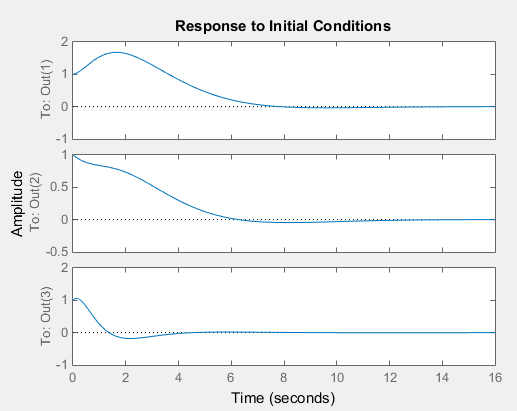
ه- پاسخ سیستم کنترل شده فوق را به ورودیهای زیر به دست آورید.
Xdموج مربعی با دامنه 0/1متر و فرکانس 0/05هرتز و . Xdبه فرم مقابل
و- خطای ماندگار سیستم کنترل شده را به ورودیهای پله و شیب محاسبه کرده و در مورد پاسخهای بند (ه) بحث کنید.
ز- بندهای (د) تا (و) این بخش را با فرض این که تابع تبدیل سروموتور برابر واحد است (صرفنظر نمودن از دینامیک سروموتور) تکرار نموده و پاسخها را با پاسخهای (د) تا (و) مقایسه کنید.
ح- با توجه به فرض بند (ز) کنترلر را PDو PID در نظر گرفته و طراحی را تکرار کنید ونتایج را با نتایج بند(ز) و بندهای (د) تا (و) مقایسه کنید.
توضیحات پروژه سیستم کنترل گوی و تیر با متلب
در گزارش پروژه ابتدا مدل سازی دینامیک سیستم انجام شده است. در بخش دوم کنترلر در محیط سیمولینک متلب طراحی شده است. سپس نتایج مورد نظر بدست آمده است و در آخر کنترلر های PD و PID پیاده سازی شده و نتایج آن نیز تحلیل شده است.
در این پروژه تمام خواسته های بالا محقق شده است.
شاید به موارد زیر نیز علاقه مند باشید:
- کنترل برداری غیرمستقیم سرعت موتور القایی
- طراحی یک کنترلر فازی و PID بر روی توپ و میله
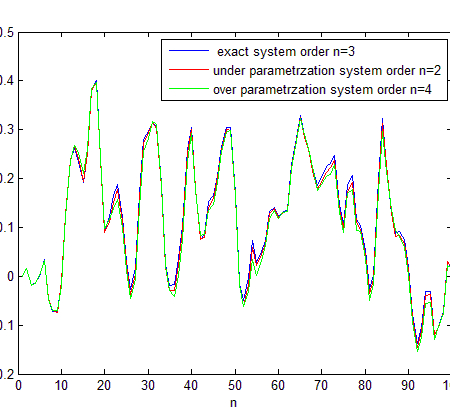
- شناسایی سیستم به 5روش
- پروژه درس کنترل چندمتغیره
طراحی و تست سیستم کنترل گوی و تیر با متلب
توسط مجریان سایت متلب کدر تهیه شده و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این پروژه دقیقا مطابق خواسته شما نمی باشد، با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.

نقد و بررسیها
هنوز بررسیای ثبت نشده است.