

توضیحات
کنترل برداری غیرمستقیم سرعت موتور القایی
Indirect vector control of induction motor speed
شبیه سازی در محیط سیمولینک متلب انجام شده است.
دارای گزارش ورد 7 صفحه ای از تئوری, سیمولینک و نتایج شبیه سازی است.
دارای ویدیو 18 دقیقه ای توضیحات برنامه نویس در مورد شبیه سازی و آموزش آن است.
توضیحات پروژه کنترل برداری غیرمستقیم سرعت موتور
شبیه سازی با متلب 2013b انجام شده است. با متلب 2021b نیز تست و اجرا شده است.
در اینجا بخشهایی از گزارش را آورده ایم و در انتها نتایج بدست آمده از شبیه سازی را نمایش داده ایم.
مهمترین مزیتهای موتور القایی در مقابل موتور DC ساختار ساده، راندمان بالاتر، قیمت کمتر و رنج توان بالاتر میباشد. در مقابل مهمترین حسن موتورهای DC در مقابل موتورهای القایی کنترل راحتتر و دقیقتر این موتورها میباشد. روشهای زیادی برای کنترل موتور القایی پیشنهاد شده است که بطور کلی میتوان روشهای کنترل موتور القایی را به صورت زیر دستهبندی کرد:
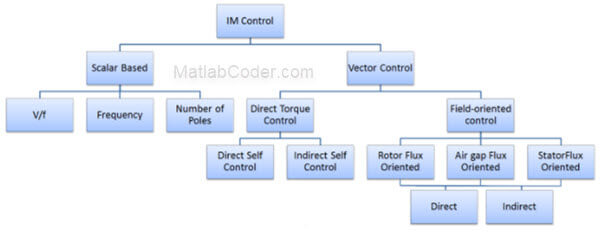
روشهای کنترل اسکالر معمولاً سادهتر و ارزانتر و در مقابل دارای محدودیت رنج کنترل سرعت میباشند. روشهای کنترل برداری پیچیدهتر و گرانتر میباشند ولی میتوانند سرعت موتور را از سرعت صفر تا بالاتر از سرعت نامی موتور به طور دقیق کنترل کنند.
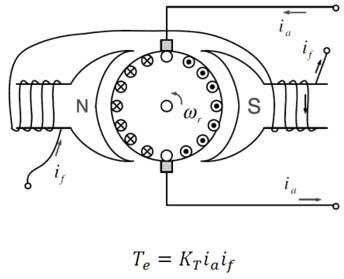
همانطور که در شکل زیر مشخص است، در موتور DC دو سیمپیچی بصورت عمود بر هم وجود دارد، بنابراین تغییرات یکی روی دیگری اثری ندارد. پس میتوان جریان شار (سیمپیچی میدان) را ثابت در نظر گرفت و با کنترل گشتاور (جریان سیمپیچی آرمیچر) سرعت را از صفر تا بالاتر از سرعت نامی کنترل کرد:
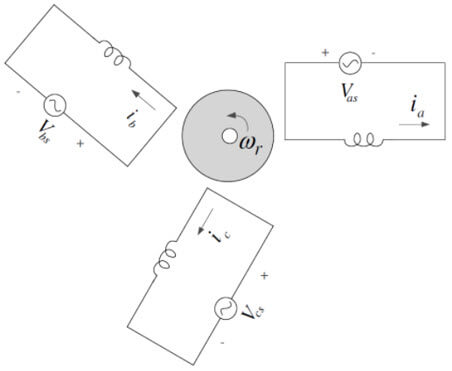
روش کنترل برداری بر این اساس شکل گرفته است که ابتدا مدل سه فاز موتور القایی را به مدل دو سیمپیچ عمود بر هم تبدیل کرده و سعی میکند که جریان این دو سیم پیچی را کنترل کند. برای مثال فرض کنید موتور القایی با سه سیمپیچی موجود میباشد:
در اینجا به صورت بریده بخشی از گزارش آمده است.
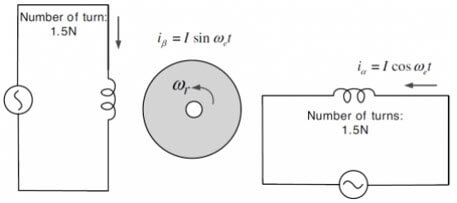
توجه کنید که مقدار جریان در این حالت DC و تعداد دور سیمپیچی 1.5 برابر شده است. همانطور که مشخص است چون دو سیمپیچی برهم عمود هستند پس دیگر بر یکدیگر تاثیر نمیگذارند. اساس کنترل برداری نیز مثل مثال بالا میباشد یعنی با تبدیل مدل سه فاز به مدل دو فاز dq دوار، میتوان با جهتدهی مناسب شار گشتاور را با جریان iqs و مقدار شار را با ids کنترل کرد. با توجه به اینکه کدام شار برای جهت دهی انتخاب شود روش کنترل برداری به سه روش پیادهسازی میشود:
- روش جهتدهی شار روتور (Rotor Flux Oriented)
- روش جهتدهی شار استاتور (Stator Flux Oriented)
- روش جهتدهی شار مغناطیس کنندگی (Magnetizing Flux Oriented)
مزیت و معایب هر یک از روشهای بالا عبارتاند از: روش جهتدهی شار روتور نسبت به پارامترهای موتور
حساس و دارای مدار مجزاساز(Decouple) پیچیده میباشد ولی این روش پایدار میباشد. روش جهتدهی شار استاتور حساسیت کمتری نسبت به پارامترهای موتور دارد و مدار مجزاساز (Decouple) آن ساده میباشد ولی این روش دارای محدودیت جریان iqs جهت پایداری میباشد. روش جهتدهی شار مغناطیس کنندگی حساسیت نسبت به لرزش و حرارت موتور دارد و همچنین اندازهگیری شار در این روش مشکل میباشد. باتوجه به مطالب گفته شده چون ما نیاز به کنترل پایدار داریم بنابراین به سراغ روش جهتدهی شار روتور میرویم.
با توجه به اینکه زاویه روتور چگونه اندازهگیری میشود، روشهای کنترل برداری به دو روش پیادهسازی میشوند:
- روش مستقیم (Direct)
- روش غیرمستقیم (Indirect)
در روش مستقیم، زاویه روتور مستقیماً بوسیله سنسور اندازه گیری میشود ولی در روش غیر مستقیم موقعیت
روتور به وسیله پارامترهای دیگر تخمین زده میشود. با توجه به اینکه از چه نوع اینورتری برای کنترل استفاده میشود روشهای کنترل برداری به دو روش زیرتقسیم بندی میشوند:
- اینورتر منبع ولتاژی
- اینورتر منبع جریانی
در این رابطه فقط باید اشاره کنم که اینورترهای منبع جریانی معمولاً برای موتورهای خیلی بزرگ استفاده میشوند.
در ادامه روش جهت دهی شار روتور به روش غیر مستقیم توضیح داده میشود.
نکاتی را که برای کنترل موتور در این روش باید در نظر گرفت عبارت اند از:
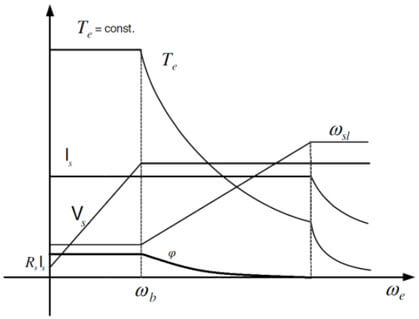
1- مانند موتور DC بسته به ناحیه عملکرد، پارامترهای موتور از قبیل شار، ولتاژ و جریان بصورت زیر تغییر میکنند:
2- توجه کنید که برای بهبود این روشها میتوان از فیدفوروارد ولتاژ و مجزاسازی پارامترها نیز استفاده کرد. در این روشها تعداد کنترل کننده ها (5-6) افزایش مییابد.
3- نحوه تنظیم کنترل کننده های PID میتواند بر سرعت پاسخ تاثیر بسزایی داشته باشد.
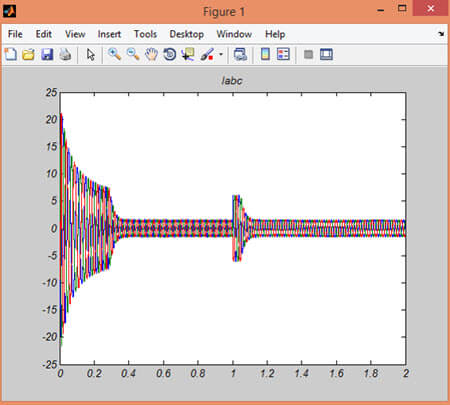
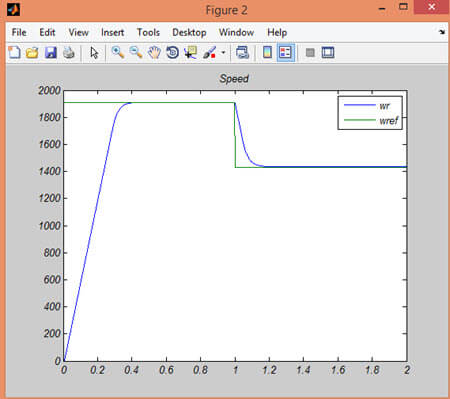
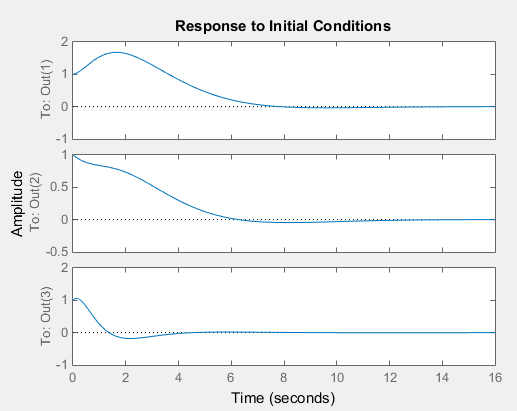
نتایج خروجی شبیه سازی
شاید علاقه مند به شبیه سازی مقالات زیر باشید:
- طراحی و شبیه سازی کنترل کننده فازی برای سیستم ترمز ضد قفل فازی
- کنترل غیرخطی و مستقل توانهای اکتیو و راکتیو ژنراتور القایی تغذیه دوگانه به صورت متمرکز و غیر متمرکز
- بررسی استارت و کار موتورهای القایی با درایو فرکانس متغیر
- موتور سنکرون مغناطیس دائم با کنترل سرعت خطی درجه دوم
- کنترل گشتاور مستقیم در موتور سنکرون آهنربای دائم
- مقایسه عملکرد توربین بادی مبتنی بر ژنراتور القایی از دو سو تغذیه با استفاده از کنترل کننده های تحمل خطای مرتبه کسری و صحیح
شبیه سازی کنترل برداری غیرمستقیم سرعت موتور القایی با متلب
توسط مجریان سایت متلب کدر تهیه شده و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این پروژه دقیقا مطابق خواسته شما نمی باشد، با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.



نقد و بررسیها
هنوز بررسیای ثبت نشده است.