


توضیحات
بررسی انواع روش های دکوپله سازی در کنترل چند متغیره به همراه شبیه سازی متلب
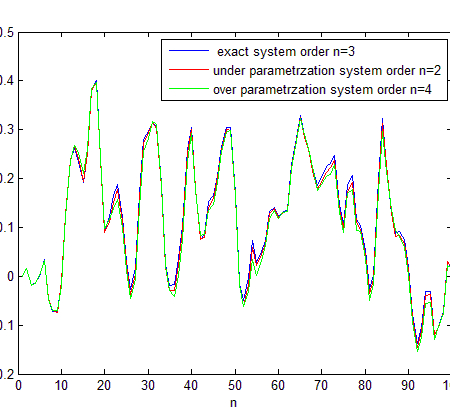
در این گزارش کمک آموزشی سه روش کلی دکوپله سازی مبتنی بر مراجع لاتین و کتب مراجع فارسی (دکتر خاکی صدیق) شامل:
1- دکوپله سازی با استفاده از پیش جبرانساز دینامیکی
2- دکوپله سازی با استفاده از پیش جبرانساز استاتیکی
مجموعه بسته کمک- آموزشی در رهیافت کنترل چند متغیره- قسمت دوم: آموزش طراحی کنترل غیر متمرکزPI ، بررسی تداخل با بررسی گرشگورین وجفت سازی ورودی– خرجی(پیکره بندی کنترل)
بطور کلی در طراحی سیستم های چند متغیره با رویکرد غیر متمرکز سعی برآن است که با یک تابع تبدیل قطری برای کنترل کننده سیستم را کنترل کنند. در این رویکرد ابتدا تابع تبدیل حلقه بسته سیستم با استفاده از فیدبک و روش های دیگر مانند پیش جبرانسازی قطری می گردد. سپس با توجه به دکوپله بودن سیستم برای هر ورودی و خروجی متناظر کنترل کننده طراحی می گردد.
در این گزارش آموزشی با استفاده از مسئله 7-3 کتاب چند متغیره دکتر خاکی صدیق مراحل طراحی کنترل غیر متمرکز شامل:
1-تعیین پیکره بندی کنترل(جفت سازی ورودی- خروجی) با ماتریس RGA
2- بررسی کنترل پذیری انتگرالی و کنترل پذیری انتگرالی غیر متمرکز
3- بررسی تداخل سیستم حلقه باز با رسم باندهای گرشگورین
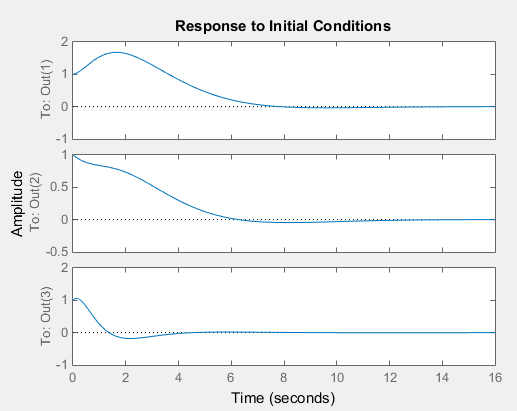
4- طراحی یک کنترل کننده PI غیر متمرکز و ببرسی رفتار حلقه بسته
با استفاده ازکد متلب شبیه سازی و در گزارش Word بررسی و تحلیل می گردد.
کد های متلب طوری ارائه شده است که فراگیران با جایگذاری سیستم های مشابه دیگر می توانند با دانش اولیه خود در این مباحث مراحل این مسئله را مجدد انجام دهند. این گزارش می تواند مورد استفاده دانشجویان عزیز مقطع ارشد برق- کنترل که درس کنترل متغیره دارند و مهندسین کنترل قرار گیرد.


نقد و بررسیها
هنوز بررسیای ثبت نشده است.